時隔多年,AI船長終于能揚帆啟航?互聯網+
導讀
Kongsberg、三星重工、IBM、MIT….歷時已久的自駕船競賽花落誰家?
Kongsberg、三星重工、IBM、MIT….歷時已久的自駕船競賽花落誰家?
文/ 智能相對論(ID:aixdlun)
作者/ 離離

IBM與海洋研究非營利組織ProMare合作推出的AI船長,在上周剛結束的2021國際電子消費展上獲得了最佳創新獎。其具備的AI全自主決策駕駛技術,讓沉寂已久的自駕船話題重新出現在大眾視野。
默默努力的造船者
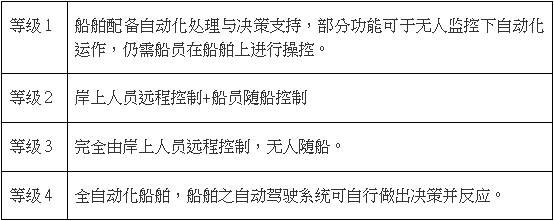
相比于汽車,船舶的自動駕駛技術起步稍晚。國際海事法規的限制使自駕船無法航出公海進行遠洋試驗,相關的技術研究多為紙上談兵,無法獲得第一手的實驗數據。2018年,聯合國分支機構國際海事組織(IMO)明確將無人駕駛船舶分級,這項技術才得以走向統一的開發流程。
 2018年底,世界上第一艘等級四的自動駕駛渡輪Falco號,在芬蘭帕爾加斯和瑙沃之間完成短距離的自主航行試驗。這艘由Rolls-Royce與芬蘭國營渡輪公司Finferries合作研發的渡輪已完成在大雪和強風中躲避障礙物并自動靠泊的實驗。
2018年底,世界上第一艘等級四的自動駕駛渡輪Falco號,在芬蘭帕爾加斯和瑙沃之間完成短距離的自主航行試驗。這艘由Rolls-Royce與芬蘭國營渡輪公司Finferries合作研發的渡輪已完成在大雪和強風中躲避障礙物并自動靠泊的實驗。
Kongsberg Group的自動駕駛純電動集裝箱貨船Yara Birkeland處于試驗階段,預計于2022年實現完全無人操控的自主航行,解決挪威沿岸的肥料運輸問題。
 2019年6月,IMO發布《自主船舶試驗暫行指南》(MASS)后,各國的無人駕駛船舶得以在公共海域進行實驗。日本郵船公司(NYK Line)的大型汽車運輸船“Iris Leader”藉由日本郵船與日本海洋科學(JMS)共同開發的最佳導航程序——Sherpa System for Real (SSR)船舶導航系統,在船員監測下完成中國到日本的遠程操控+自主航行。此系統運用AI和物聯網,會全天候根據環境條件計算最佳路線來對船只進行導航,并通過雷達和自動識別系統來實現避碰。
2019年6月,IMO發布《自主船舶試驗暫行指南》(MASS)后,各國的無人駕駛船舶得以在公共海域進行實驗。日本郵船公司(NYK Line)的大型汽車運輸船“Iris Leader”藉由日本郵船與日本海洋科學(JMS)共同開發的最佳導航程序——Sherpa System for Real (SSR)船舶導航系統,在船員監測下完成中國到日本的遠程操控+自主航行。此系統運用AI和物聯網,會全天候根據環境條件計算最佳路線來對船只進行導航,并通過雷達和自動識別系統來實現避碰。

韓國三星重工的SAS自動駕駛系統具備空間識別技術,利用高性能攝像頭和激光雷達探測周邊狀況。輸入目的地后,AI便自主選擇最佳航線,無需船員在船上操縱。利用SK電訊提供的視頻控制解決方案T-Live Caster和基于云的IoT解決方案,可通過衛星通信和5G進行聯絡與控制船只。去年,此船已實現從相距250公里的管制中心遠程進行監視,順利完成單程約10公里的自主航行試驗。
作為造船大國,中國近年也致力研發船舶自動駕駛技術。由中國船舶重工集團有限公司第七〇四研究所、交通運輸部水運科學研究院、智慧航海(青島)科技有限公司合作建造的“智騰”號已完成自主避障試驗。其具備自動避碰、水下避碰、自動靠離泊和遠程遙控功能,并搭建船岸協同通信系統和大數據系統。雖可達到MASS第三階段“周期性無人在船”的要求,但仍未具備完全的自動駕駛能力。
目前,由上海佳豪船舶設計院設計,智慧航海(青島)科技有限公司監造,青島造船廠有限公司承建,全球噸位最大的智能航行船舶“智飛”號已投入建造。其通過發電機組+動力電池的串聯式混合動力方案,對動力系統進行優化。此船計劃于2021年6月建造完成并交付使用。
巨大的商業誘惑
雖然船舶自動駕駛技術難以實現,但依然有許多公司選擇進入這個賽道。由于全世界有八成以上的貨物都會通過海洋運輸,即便“道阻且長”,船舶自動駕駛技術可大幅降低人事及交通運輸成本、節省貨船空間并提升航運安全性,頗具商業價值。因此,除了大型船舶貨運公司想借此節省成本,其巨大商業利益也吸引許多專門提供自駕技術服務的新玩家入場。
像美國初創公司Shone便是作為自動駕駛技術供應商來為船舶提供服務。通過AI融合來自雷達和攝像機等船載傳感器的數據,繪制出船舶周圍危險隱患圖片,并給予導航幫助,賦予現有船只“半自動”駕駛技術。目前,Shone與法國大型航運公司CMA CGM達成了合作協議,為其船舶安裝態勢感知系統。
商業模式類似的,還有另一家初創企業Sea Machine Robotics。它專門開發用于自主控制和遠程船只控制的工業級控制系統,并結合AI和激光雷達軟件來幫助船舶感知周圍的環境。此系統也可安裝在現有船只上,Sea Machine曾與航運公司Maersk合作,為其商船安裝了自主控制系統SM400的態勢感知軟件,以提高安全性并提供導航服務。
目前,自動駕駛船舶的商業化還僅停留在AI輔助駕駛的階段。無論是初創企業還是大型船舶公司,目前都尚未研發出完全的自動駕駛船舶。外部環境所造成的技術難題與高昂的測試成本皆拖慢了自駕船的研發進程。
遠航的阻力
即便海陸空的自動駕駛技術都是依托于大數據計算分析和人工智能在環境感知、決策、定位避障上面的應用,用于海上航行的探測器對覆蓋范圍與信號傳播能力的要求卻遠高于陸地。
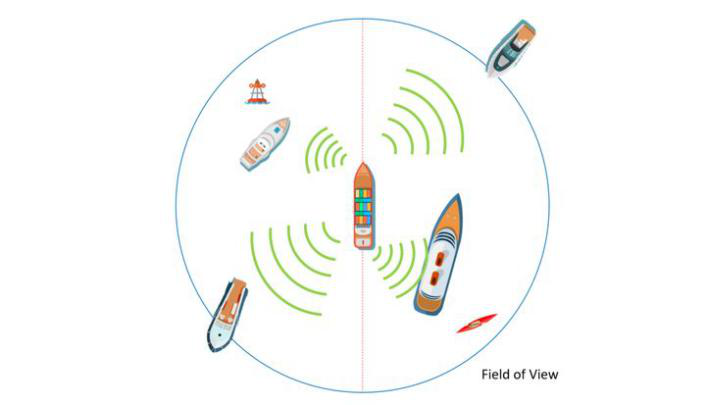
首先,在感知能力上,自駕車的傳感器只需覆蓋200-300米的范圍,而體積更大質量更重的船舶則需要在超過1.5公里的范圍內探測障礙物,同時須“向下探測”以免觸礁擱淺。水域復雜與交通密集的港口對于船只的避障能力也是一大考驗。
船舶在海上航行時間長,移動路線受風浪影響大,即便風平浪靜,船只也會隨著波浪起伏漂流。自動駕駛船舶須結合船只重量和特殊的動力模式,在海洋變幻莫測的自然環境下,準確預測看似毫無規則的船只動作路徑,分析并選擇最佳航路。此外,還要解決在遠洋遭遇惡劣天氣時信號傳輸的困難。在外部環境適應上,自動駕船的技術要求遠遠高于自駕車。
由于電池無法負荷大型船舶遠洋航行所需動力,故現在的大型貨船多以柴油發動為主。燃油船的動力系統操作比電動船復雜許多,難以搭建完全由AI自主控制的模型。且燃油系統的日常維護十分瑣碎,過濾燃油雜質、進行管道疏通與清潔等隨機發生的系統問題使維護工作不易自動化。
另外,電力、網絡和系統安全可說是使用人工智能決策的必備條件。如何在遠洋航行時確保電力供應與系統設備正常運行,是自駕船必須面對的問題。且遠洋航船所使用的衛星通信寬帶小、容易延遲,不像無人車能通過高帶寬網絡,將實時感測的環境數據上傳云端系統,利用大數據分析完成人工智能自主決策。船舶本身還必須具備較強的數據處理能力并改善通信環境,才可能實現全程AI自動駕駛。
再者,船舶造價遠高于汽車,自動駕駛技術測試成本十分高昂。且海洋交通數字化進程不如陸地,船舶行業缺乏公開數據庫來訓練自動駕駛AI神經網絡模型。
自然環境、設備問題、電力供應、數據處理、信號傳輸等種種原因使得現有的自主航行系統尚無法完全滿足船舶安全的操控需求,需要遠程遙控結合部分自動控制才能保障船舶的運營安全。
因此,從2018年以來,北歐及中日韓等國仍大多還處于“半自動駕駛”階段,多為遠程操控或短距離部分自主航行,尚無法完成全程由AI自主決策的遠洋航行。
而IBM最新推出的AI船長已針對以上問題提出了新的解決方案,有望在自駕船泊領域拔得頭籌。
IBM和MIT的答卷
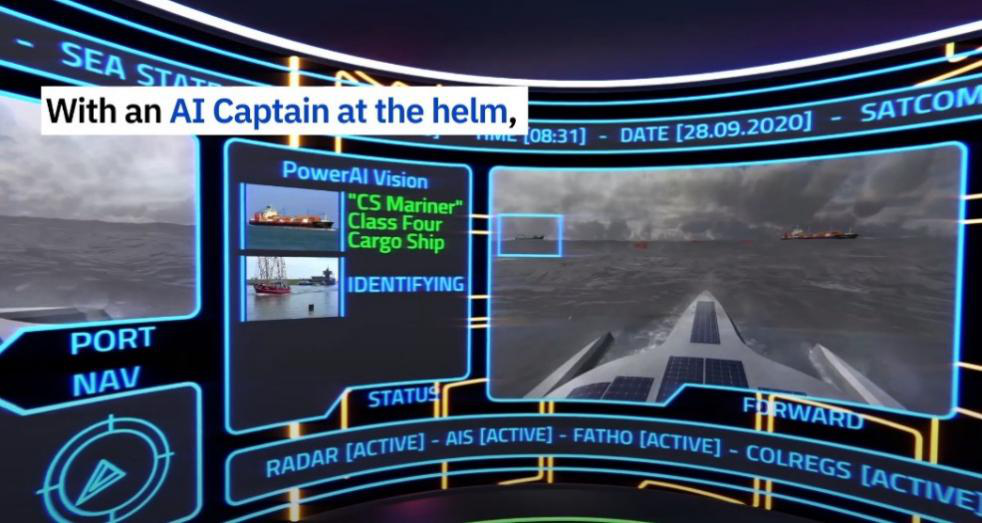
不同于歐日韓所專注的大型貨運及渡輪自動駕駛技術,IBM的AI自駕船“五月花號”用于收集、探測有關海洋的數據,以幫助科學家們解決全球暖化、氣候變遷、環境污染及海洋動物保護問題。

較小的體積讓五月花號得以使用風力和電力作為動力來源,利用太陽能電池幫助補充電力。比起復雜且不易維護的燃油系統,電力系統較容易搭建AI自主控制的模型。IBM旗下The Weather Company會為AI船長提供天氣預報數據來輔助自主導航決策,幫助其應對變化多端的天氣狀況。
在信號傳輸與計算上,五月花號使用完全自主的IBM邊緣計算系統解決遠洋航行無法訪問高帶寬網絡的問題。藉由多個船載的 NVIDIA Jetson AGX Xavier 設備進行數據本地化處理。不僅能提高決策速度、減少船上的數據流和數據存儲量,還能確保系統不受網絡黑客入侵。
 自主決策方面,通過內部搭建的運營決策管理系統ODM保障船只完全遵循國際海事法規,并以完全透明的方式記錄決策過程,從而避免“黑箱操作”的情況。運行于 RHEL (RedHat Enterprise Linux) 上的安全管理者功能將復核AI 船長作出的所有決策,以確保這些決策對五月花號及其附近其它船只而言均屬安全。
自主決策方面,通過內部搭建的運營決策管理系統ODM保障船只完全遵循國際海事法規,并以完全透明的方式記錄決策過程,從而避免“黑箱操作”的情況。運行于 RHEL (RedHat Enterprise Linux) 上的安全管理者功能將復核AI 船長作出的所有決策,以確保這些決策對五月花號及其附近其它船只而言均屬安全。
為了使世界各地的追隨者能夠在執行MAS的各種任務時保持最新狀態,IBM和ProMare啟動了一個新的交互式Web門戶——MAS400門戶網站,用于提供有關船舶位置、航行速度、環境條件和來自各種研究項目數據的實時更新。
目前看來,IBM的AI船長似乎已經做好出航的準備。五月花號預計于今年春天從英國普利茅斯啟程前往美國馬薩諸塞州普利茅斯,它能否克服遠洋海域的極端天氣成為實驗的重點。
若是實驗成功,五月花號將成為有史以來首批跨越大西洋的自主航行船舶。其搭載的太陽能電力、邊緣計算、AI自主決策與規則管理系統將為自動駕駛船舶率先建立一個創新有效的解決方案。
除了難度較高的大型海運船只,嘗試將自動駕駛船應用于不需擔心信號傳輸與極端天氣的城市運河似乎也是個不錯的選擇。
麻省理工學院計算器科學與人工智能實驗室(CSAIL)的研究人員完成了一款專門為阿姆斯特丹運河搭載乘客、貨物的自動駕駛船Roboat II。其船體上配置了傳感器、推進器、微控制器、攝像機和其他硬件,可在湍急的水流中保持穩定前行。

自主決策方面,Roboat II通過同步定位和映射算法(SLAM),利用激光雷達、GPS傳感器及用于定位、姿態和速度的慣性測量單元進行自我定位。其搭載的非線性模型預測控制器將跟蹤來自狀態規劃器的參考軌跡,規劃器再更新其路徑以避開檢測到的障礙。
最有趣的是,這款船還可以與它的“小伙伴”“串聯”或“并聯”在一起,能夠自動變換隊形,解決運河船只擁堵的問題。無論船隊是“串聯”還是“并聯”,都是中間的Roboat II負責領導船隊運行的方向和軌跡。通過偵測自己與船隊結構中心的相對位置,當領隊 Roboat II 開始向給定的目的地移動時,兩側的Roboat II便可以估計領隊的意圖并調整自己的移動軌跡。
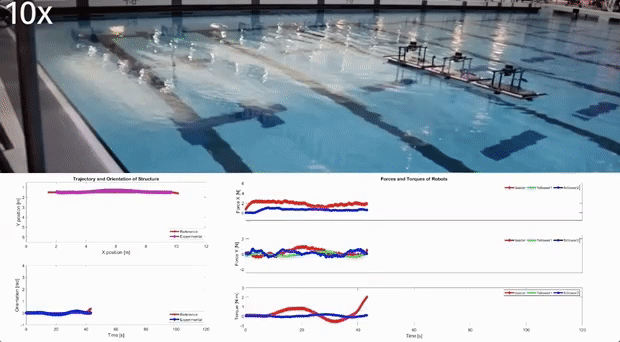 在最新的試驗中,Roboat II可以成功在阿姆斯特丹運河航行三個小時,并以17厘米的誤差幅度回到起始位置。目前,研究人員還在探索自適應控制器,希望實現當物品放置在船上時,該控制器能動態改變船隊結構。
在最新的試驗中,Roboat II可以成功在阿姆斯特丹運河航行三個小時,并以17厘米的誤差幅度回到起始位置。目前,研究人員還在探索自適應控制器,希望實現當物品放置在船上時,該控制器能動態改變船隊結構。
縮小才是關鍵?
目前搭載自主航行系統的大型貨船,只能在沿海或短距離內完成自主航行;在距離較長的試驗中僅能做到遠程操控+自主航行的半自動駕駛。現行的船只雖大部份都搭載了傳感器與導航等智能設備,也還停留在輔助駕駛與機械自動化的階段。
對于此狀況,距離完全自主駕駛最近的五月花號與Roboat II,似乎分別在體積與應用環境上展現了新的思路。
相較于北歐和中日韓研發的自駕船,五月花號和Roboat II的體積都比貨輪更小。得以使用電力系統推動,更容易搭建AI自主決策模型。就感知層面而言,相較于大型船舶,小型船舶的盲區面積小,所需的傳感器種類和數量更少、探測范圍更小,所需處理和傳輸的數據量也相應減少,對數據處理器與訊號傳輸量的要求也隨之降低,更容易實現對周圍環境的有效探測。
此外,小型船舶可使用多向動力推進系統,配合GPS能更精確地控制運動軌跡,提升機動性與靈活性,更容易在運河等復雜水域和交通繁忙的港口完成避障。但在遠洋航行中,對大浪等惡劣環境的耐受性也隨之降低。因此更適合運用于河運等受天氣影響較小的地區。
雖然五月花號和Roboat II尚未真正完成商業應用,對于暫時陷入瓶頸的船舶自動駕駛技術而言,適當縮小船只體積或從環境相對單純的河道開始試驗,也許是個可以嘗試的方向。待小型河船完成自駕技術商業化,再按部就班航向遠洋。
漢堡工商管理學院公布的報告指出,理想情況下,2025年將會出現約1000艘自動駕駛船舶和2000艘半自動駕駛的船舶。就現有技術而言,半自動駕駛船舶已經存在。AI船長真正揚帆啟航的日子,似乎也離我們不再遙遠。
*本文圖片均來源于網絡 此內容為【智能相對論】原創, 僅代表個人觀點,未經授權,任何人不得以任何方式使用,包括轉載、摘編、復制或建立鏡像。 部分圖片來自網絡,且未核實版權歸屬,不作為商業用途,如有侵犯,請作者與我們聯系。 ?AI產業新媒體;
?澎湃新聞科技榜單月度top5; ?文章長期“霸占”鈦媒體熱門文章排行榜TOP10; ?著有《人工智能 十萬個為什么》 ?【重點關注領域】智能家電(含白電、黑電、智能手機、無人機等AIoT設備)、智能駕駛、AI+醫療、機器人、物聯網、AI+金融、AI+教育、AR/VR、云計算、開發者以及背后的芯片、算法等。
IBM與海洋研究非營利組織ProMare合作推出的AI船長,在上周剛結束的2021國際電子消費展上獲得了最佳創新獎。其具備的AI全自主決策駕駛技術,讓沉寂已久的自駕船話題重新出現在大眾視野。
默默努力的造船者
相比于汽車,船舶的自動駕駛技術起步稍晚。國際海事法規的限制使自駕船無法航出公海進行遠洋試驗,相關的技術研究多為紙上談兵,無法獲得第一手的實驗數據。2018年,聯合國分支機構國際海事組織(IMO)明確將無人駕駛船舶分級,這項技術才得以走向統一的開發流程。
2018年底,世界上第一艘等級四的自動駕駛渡輪Falco號,在芬蘭帕爾加斯和瑙沃之間完成短距離的自主航行試驗。這艘由Rolls-Royce與芬蘭國營渡輪公司Finferries合作研發的渡輪已完成在大雪和強風中躲避障礙物并自動靠泊的實驗。
Kongsberg Group的自動駕駛純電動集裝箱貨船Yara Birkeland處于試驗階段,預計于2022年實現完全無人操控的自主航行,解決挪威沿岸的肥料運輸問題。
2019年6月,IMO發布《自主船舶試驗暫行指南》(MASS)后,各國的無人駕駛船舶得以在公共海域進行實驗。日本郵船公司(NYK Line)的大型汽車運輸船“Iris Leader”藉由日本郵船與日本海洋科學(JMS)共同開發的最佳導航程序——Sherpa System for Real (SSR)船舶導航系統,在船員監測下完成中國到日本的遠程操控+自主航行。此系統運用AI和物聯網,會全天候根據環境條件計算最佳路線來對船只進行導航,并通過雷達和自動識別系統來實現避碰。
韓國三星重工的SAS自動駕駛系統具備空間識別技術,利用高性能攝像頭和激光雷達探測周邊狀況。輸入目的地后,AI便自主選擇最佳航線,無需船員在船上操縱。利用SK電訊提供的視頻控制解決方案T-Live Caster和基于云的IoT解決方案,可通過衛星通信和5G進行聯絡與控制船只。去年,此船已實現從相距250公里的管制中心遠程進行監視,順利完成單程約10公里的自主航行試驗。
作為造船大國,中國近年也致力研發船舶自動駕駛技術。由中國船舶重工集團有限公司第七〇四研究所、交通運輸部水運科學研究院、智慧航海(青島)科技有限公司合作建造的“智騰”號已完成自主避障試驗。其具備自動避碰、水下避碰、自動靠離泊和遠程遙控功能,并搭建船岸協同通信系統和大數據系統。雖可達到MASS第三階段“周期性無人在船”的要求,但仍未具備完全的自動駕駛能力。
目前,由上海佳豪船舶設計院設計,智慧航海(青島)科技有限公司監造,青島造船廠有限公司承建,全球噸位最大的智能航行船舶“智飛”號已投入建造。其通過發電機組+動力電池的串聯式混合動力方案,對動力系統進行優化。此船計劃于2021年6月建造完成并交付使用。
巨大的商業誘惑
雖然船舶自動駕駛技術難以實現,但依然有許多公司選擇進入這個賽道。由于全世界有八成以上的貨物都會通過海洋運輸,即便“道阻且長”,船舶自動駕駛技術可大幅降低人事及交通運輸成本、節省貨船空間并提升航運安全性,頗具商業價值。因此,除了大型船舶貨運公司想借此節省成本,其巨大商業利益也吸引許多專門提供自駕技術服務的新玩家入場。
像美國初創公司Shone便是作為自動駕駛技術供應商來為船舶提供服務。通過AI融合來自雷達和攝像機等船載傳感器的數據,繪制出船舶周圍危險隱患圖片,并給予導航幫助,賦予現有船只“半自動”駕駛技術。目前,Shone與法國大型航運公司CMA CGM達成了合作協議,為其船舶安裝態勢感知系統。
商業模式類似的,還有另一家初創企業Sea Machine Robotics。它專門開發用于自主控制和遠程船只控制的工業級控制系統,并結合AI和激光雷達軟件來幫助船舶感知周圍的環境。此系統也可安裝在現有船只上,Sea Machine曾與航運公司Maersk合作,為其商船安裝了自主控制系統SM400的態勢感知軟件,以提高安全性并提供導航服務。
目前,自動駕駛船舶的商業化還僅停留在AI輔助駕駛的階段。無論是初創企業還是大型船舶公司,目前都尚未研發出完全的自動駕駛船舶。外部環境所造成的技術難題與高昂的測試成本皆拖慢了自駕船的研發進程。
遠航的阻力
即便海陸空的自動駕駛技術都是依托于大數據計算分析和人工智能在環境感知、決策、定位避障上面的應用,用于海上航行的探測器對覆蓋范圍與信號傳播能力的要求卻遠高于陸地。
首先,在感知能力上,自駕車的傳感器只需覆蓋200-300米的范圍,而體積更大質量更重的船舶則需要在超過1.5公里的范圍內探測障礙物,同時須“向下探測”以免觸礁擱淺。水域復雜與交通密集的港口對于船只的避障能力也是一大考驗。
船舶在海上航行時間長,移動路線受風浪影響大,即便風平浪靜,船只也會隨著波浪起伏漂流。自動駕駛船舶須結合船只重量和特殊的動力模式,在海洋變幻莫測的自然環境下,準確預測看似毫無規則的船只動作路徑,分析并選擇最佳航路。此外,還要解決在遠洋遭遇惡劣天氣時信號傳輸的困難。在外部環境適應上,自動駕船的技術要求遠遠高于自駕車。
由于電池無法負荷大型船舶遠洋航行所需動力,故現在的大型貨船多以柴油發動為主。燃油船的動力系統操作比電動船復雜許多,難以搭建完全由AI自主控制的模型。且燃油系統的日常維護十分瑣碎,過濾燃油雜質、進行管道疏通與清潔等隨機發生的系統問題使維護工作不易自動化。
另外,電力、網絡和系統安全可說是使用人工智能決策的必備條件。如何在遠洋航行時確保電力供應與系統設備正常運行,是自駕船必須面對的問題。且遠洋航船所使用的衛星通信寬帶小、容易延遲,不像無人車能通過高帶寬網絡,將實時感測的環境數據上傳云端系統,利用大數據分析完成人工智能自主決策。船舶本身還必須具備較強的數據處理能力并改善通信環境,才可能實現全程AI自動駕駛。
再者,船舶造價遠高于汽車,自動駕駛技術測試成本十分高昂。且海洋交通數字化進程不如陸地,船舶行業缺乏公開數據庫來訓練自動駕駛AI神經網絡模型。
自然環境、設備問題、電力供應、數據處理、信號傳輸等種種原因使得現有的自主航行系統尚無法完全滿足船舶安全的操控需求,需要遠程遙控結合部分自動控制才能保障船舶的運營安全。
因此,從2018年以來,北歐及中日韓等國仍大多還處于“半自動駕駛”階段,多為遠程操控或短距離部分自主航行,尚無法完成全程由AI自主決策的遠洋航行。
而IBM最新推出的AI船長已針對以上問題提出了新的解決方案,有望在自駕船泊領域拔得頭籌。
IBM和MIT的答卷
不同于歐日韓所專注的大型貨運及渡輪自動駕駛技術,IBM的AI自駕船“五月花號”用于收集、探測有關海洋的數據,以幫助科學家們解決全球暖化、氣候變遷、環境污染及海洋動物保護問題。
較小的體積讓五月花號得以使用風力和電力作為動力來源,利用太陽能電池幫助補充電力。比起復雜且不易維護的燃油系統,電力系統較容易搭建AI自主控制的模型。IBM旗下The Weather Company會為AI船長提供天氣預報數據來輔助自主導航決策,幫助其應對變化多端的天氣狀況。
在信號傳輸與計算上,五月花號使用完全自主的IBM邊緣計算系統解決遠洋航行無法訪問高帶寬網絡的問題。藉由多個船載的 NVIDIA Jetson AGX Xavier 設備進行數據本地化處理。不僅能提高決策速度、減少船上的數據流和數據存儲量,還能確保系統不受網絡黑客入侵。
自主決策方面,通過內部搭建的運營決策管理系統ODM保障船只完全遵循國際海事法規,并以完全透明的方式記錄決策過程,從而避免“黑箱操作”的情況。運行于 RHEL (RedHat Enterprise Linux) 上的安全管理者功能將復核AI 船長作出的所有決策,以確保這些決策對五月花號及其附近其它船只而言均屬安全。
為了使世界各地的追隨者能夠在執行MAS的各種任務時保持最新狀態,IBM和ProMare啟動了一個新的交互式Web門戶——MAS400門戶網站,用于提供有關船舶位置、航行速度、環境條件和來自各種研究項目數據的實時更新。
目前看來,IBM的AI船長似乎已經做好出航的準備。五月花號預計于今年春天從英國普利茅斯啟程前往美國馬薩諸塞州普利茅斯,它能否克服遠洋海域的極端天氣成為實驗的重點。
若是實驗成功,五月花號將成為有史以來首批跨越大西洋的自主航行船舶。其搭載的太陽能電力、邊緣計算、AI自主決策與規則管理系統將為自動駕駛船舶率先建立一個創新有效的解決方案。
除了難度較高的大型海運船只,嘗試將自動駕駛船應用于不需擔心信號傳輸與極端天氣的城市運河似乎也是個不錯的選擇。
麻省理工學院計算器科學與人工智能實驗室(CSAIL)的研究人員完成了一款專門為阿姆斯特丹運河搭載乘客、貨物的自動駕駛船Roboat II。其船體上配置了傳感器、推進器、微控制器、攝像機和其他硬件,可在湍急的水流中保持穩定前行。
自主決策方面,Roboat II通過同步定位和映射算法(SLAM),利用激光雷達、GPS傳感器及用于定位、姿態和速度的慣性測量單元進行自我定位。其搭載的非線性模型預測控制器將跟蹤來自狀態規劃器的參考軌跡,規劃器再更新其路徑以避開檢測到的障礙。
最有趣的是,這款船還可以與它的“小伙伴”“串聯”或“并聯”在一起,能夠自動變換隊形,解決運河船只擁堵的問題。無論船隊是“串聯”還是“并聯”,都是中間的Roboat II負責領導船隊運行的方向和軌跡。通過偵測自己與船隊結構中心的相對位置,當領隊 Roboat II 開始向給定的目的地移動時,兩側的Roboat II便可以估計領隊的意圖并調整自己的移動軌跡。
在最新的試驗中,Roboat II可以成功在阿姆斯特丹運河航行三個小時,并以17厘米的誤差幅度回到起始位置。目前,研究人員還在探索自適應控制器,希望實現當物品放置在船上時,該控制器能動態改變船隊結構。
縮小才是關鍵?
目前搭載自主航行系統的大型貨船,只能在沿海或短距離內完成自主航行;在距離較長的試驗中僅能做到遠程操控+自主航行的半自動駕駛。現行的船只雖大部份都搭載了傳感器與導航等智能設備,也還停留在輔助駕駛與機械自動化的階段。
對于此狀況,距離完全自主駕駛最近的五月花號與Roboat II,似乎分別在體積與應用環境上展現了新的思路。
相較于北歐和中日韓研發的自駕船,五月花號和Roboat II的體積都比貨輪更小。得以使用電力系統推動,更容易搭建AI自主決策模型。就感知層面而言,相較于大型船舶,小型船舶的盲區面積小,所需的傳感器種類和數量更少、探測范圍更小,所需處理和傳輸的數據量也相應減少,對數據處理器與訊號傳輸量的要求也隨之降低,更容易實現對周圍環境的有效探測。
此外,小型船舶可使用多向動力推進系統,配合GPS能更精確地控制運動軌跡,提升機動性與靈活性,更容易在運河等復雜水域和交通繁忙的港口完成避障。但在遠洋航行中,對大浪等惡劣環境的耐受性也隨之降低。因此更適合運用于河運等受天氣影響較小的地區。
雖然五月花號和Roboat II尚未真正完成商業應用,對于暫時陷入瓶頸的船舶自動駕駛技術而言,適當縮小船只體積或從環境相對單純的河道開始試驗,也許是個可以嘗試的方向。待小型河船完成自駕技術商業化,再按部就班航向遠洋。
漢堡工商管理學院公布的報告指出,理想情況下,2025年將會出現約1000艘自動駕駛船舶和2000艘半自動駕駛的船舶。就現有技術而言,半自動駕駛船舶已經存在。AI船長真正揚帆啟航的日子,似乎也離我們不再遙遠。
*本文圖片均來源于網絡 此內容為【智能相對論】原創, 僅代表個人觀點,未經授權,任何人不得以任何方式使用,包括轉載、摘編、復制或建立鏡像。 部分圖片來自網絡,且未核實版權歸屬,不作為商業用途,如有侵犯,請作者與我們聯系。 ?AI產業新媒體;
?澎湃新聞科技榜單月度top5; ?文章長期“霸占”鈦媒體熱門文章排行榜TOP10; ?著有《人工智能 十萬個為什么》 ?【重點關注領域】智能家電(含白電、黑電、智能手機、無人機等AIoT設備)、智能駕駛、AI+醫療、機器人、物聯網、AI+金融、AI+教育、AR/VR、云計算、開發者以及背后的芯片、算法等。
1.TMT觀察網遵循行業規范,任何轉載的稿件都會明確標注作者和來源;
2.TMT觀察網的原創文章,請轉載時務必注明文章作者和"來源:TMT觀察網",不尊重原創的行為TMT觀察網或將追究責任;
3.作者投稿可能會經TMT觀察網編輯修改或補充。
